



รายละเอียดเพิ่มเติม
MITSUBISHI มอเตอร์ รุ่น SF-QR กำลัง 1/4 แรงม้า (0.2 กิโลวัตต์) ชนิดหุ้มมิด 3 เฟส 220/380 โวลต์ 4 โพล 3 สาย IP44 ความเร็วรอบ 1450 รอบ/นาที (มิตซูบิชิ)

M151-0130 STINTERTRADE
M151-0130 STINTERTRADE
รายละเอียดสินค้า
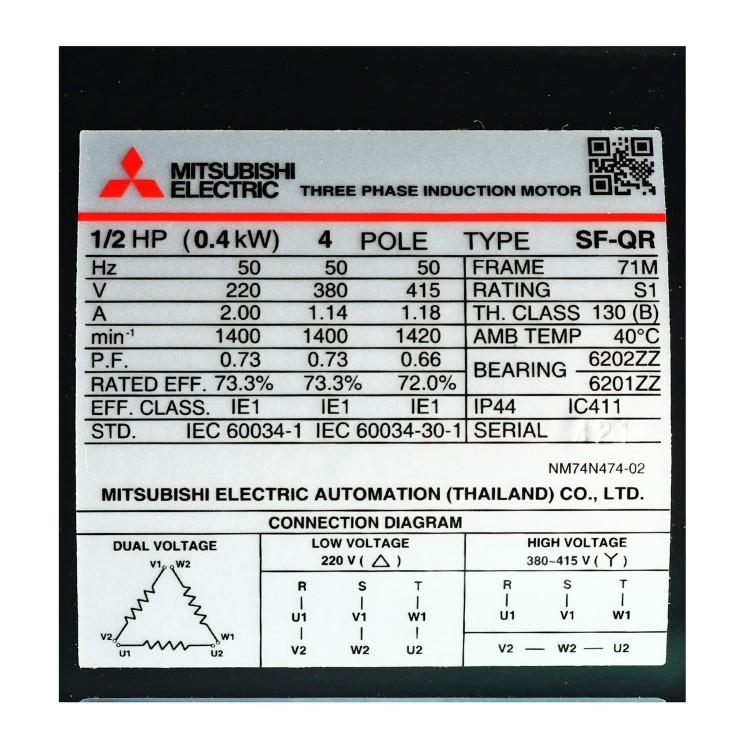
SF-QR กำลัง 1/2 แรงม้า (0.4 กิโลวัตต์) ชนิดหุ้มมิด 3 เฟส 220/380 โวลต์ 4 โพล 3 สาย IP44 ความเร็วรอบ 1450 รอบ/นาที (มิตซูบิชิ)
มอเตอร์ไฟฟ้าคุณภาพสูง ตามมาตรฐาน JIS (Japane Industrial Standard)และ IEC
(Internationa
Electrotechical Commission) ชนิดมอเตอร์เหนี่ยวนำ3
เฟสประกอบพัดลมระบายความร้อนที่ด้านท้ายของ
มอเตอร์ พร้อมครีบระบายความร้อนที่ตัวเรือน (สำหรับบางรุ่น)
ช่วยลดความเสื่อมของวัสดุภายในจากพลของ
ความร้อนที่เกิดขึ้นในระหว่างการทำงาน
ทำให้มอเตอร์มีอายุการใช้งานที่ยืนยาวมีโครงสร้างที่ทนทาน
มอเตอร์มิตซูบิชิทุกรุ่นมีประสิทธิภาพการทำงานสูง,กำลังบิดสูง
และให้กำลังเต็มประสิทธิภาพเสียงที่
เกิดจากการทำงานของมอเตอร์เบามากมีผลจากการออกแบบที่ดีได้สมดุลโครงสร้างแบบปิดป้องกันสิ่ง
แปลก
ปลอมเข้าสู่มอเตอร์ได้เป็นอย่างดีเหมาะกับการใช้งานเกี่ยวกับระบายอากาศรวมถึงงานระบบสายพา
นลำเลียง
(Conveyer) ,ต่อร่วมกับอุปกรณ์ระบบคอมเพรสเซอร์(Compressor) ,งานอุตสาหกรรม
และโรงงาน
สายการผลิตต่างๆ
การอ่านป้ายพิกัดของมอเตอร์

1. ประเภทของมอเตอร์
มอเตอร์เหนี่ยวนำ (Induction Motor)แบ่งออกเป็น 2 ประเภทใหญ่ ๆตามลักษณะการจ่ายไฟจากแหล่งจ่าย คือ1 เฟส (Single Phase) 3 เฟส (Three Phase)
2. กำลัง (Power)
คือค่ากำลังขาออกของมอเตอร์ที่เพลา แสดงหน่วยเป็น 2 แบบ คือ – แรงม้า (Horse power หรือ HP) – กิโลวัตต์ (kilowatt หรือ kW)
3. ค่าไฟ
แบ่งเป็นค่าไฟของแหล่งจ่าย ได้แก่ ค่าแรงดันไฟฟ้า มีหน่วยเป็น โวลท์ (Volt หรือ V) ค่าความถี่ไฟฟ้า มีหน่วยเป็น เฮิร์ตซ์ (Hertz หรือ Hz) ค่าปริมาณกระแสไฟฟ้าที่มอเตอร์ใช้ มีหน่วยเป็น แอมแปร์ (Ampere หรือ A)
4. ขั้ว (Pole)
จำนวนขั้วแม่เหล็กของสเตเตอร์มอเตอร์ที่มีจำนวนขั้วต่างกัน จะมีย่านความเร็วรอบที่ต่างกัน
5. ความเร็วรอบ (Speed)

ค่าความเร็วในการหมุนของเพลา มีหน่วยเป็น รอบ/นาที (min-1)
ความเร็วซิงโครนัส (Synchronous speed) ความเร็วรอบของเพลา
6. ดัชนีการป้องกัน (Degrees of Protection)

7. ขนาดเฟรม (Frame Number)

ตัวเลข คือ ความสูงจากพื้นถึงกึ่งกลางเพลา (หน่วยเป็น มม.) ตัวอักษร คือ ความยาว
8. พิกัดการทำงาน (Rating)

เป็นการกำหนดลักษณะการทำงานของมอเตอร์ที่มีความสัมพันธ์กับช่วงเวลา
9. ระดับการทนความร้อน (Thermal Class)

เป็นการบอกระดับการทนความร้อนของขดลวดสเตเตอร์
การติดตั้งมอเตอร์

1. ติดตั้งในสถานที่ที่ระบายอากาศได้ดี เว้นระยะจากผนังอย่างน้อย 20 เซนติเมตร
2. ยึดกับฐานที่มั่นคงแข็งแรง
3. การประกอบมอเตอร์เข้ากับอุปกรณ์เชื่อมต่อ (คัปปลิง, มู่เล่, อื่น ๆ) หลีกเลี่ยงการกระทบกระเทือนอย่างรุนแรงเพราะอาจทำให้ลูกปืนเสียหาย – เลือกขนาดรูกลางที่เหมาะสม- ให้แนวศูนย์กลางตรงกับแนวเพลามอเตอร์
4. การต่อคัปปลิง- ความเอียงและความเยื้องศูนย์ <0.03 มิลลิเมตร

5. การขับสายพาน – ความเอียงแนวร่องสายพาน < 1/3ᵒ – ความเยื้องแนวร่องสายพาน (L) ถ้า C ≤ 1 เมตร, L < 1 มิลลิเมตร ถ้า C > 1 เมตร, L:C < 1:1000 – ติดตั้งให้ส่วนล่างของสายพานเป็นด้านตึงเสมอ
การใช้งานครั้งแรก
รายการตรวจสอบ
1. เพลามอเตอร์ต้องหมุนได้ด้วยมือ (ยกเว้นมอเตอร์เบรก)
2. ติดตั้งฟิวส์หรือเบรกเกอร์ด้วยขนาดที่เหมาะสม
3. ต่อสายไฟและสายดินให้เรียบร้อย
4. ทิศทางการหมุนของมอเตอร์ต้องตรงกับเครื่องจักร
5. เชื่อมต่อกับเครื่องจักรอย่างมันคง แน่นหนา และแข็งแรงเพียงพอ
การใช้งานทั่วไป
ข้อควรปฏิบัติ
1. ลดโหลดตอนสตาร์ทให้น้อยที่สุด แล้วจึงค่อยเพิ่มโหลดเมื่อมอเตอร์หมุนถึงความเร็วรอบสูงสุด
2. ตรวจวัดกระแสระหว่างมอเตอร์ทำงาน หากเกินจากที่ระบุบนป้ายพิกัด ให้ลดโหลดลง
3. ตรวจสอบว่ามีเสียงดังผิดปกติที่ลูกปืนหรือไม่
4. หากไฟดับให้สับสวิทช์ตัดไฟมอเตอร์ เมื่อไฟมาจึงค่อยสับสวิทช์จ่ายไฟให้มอเตอร์
5. หยุดมอเตอร์ทันทีเมื่อพบความผิดปกติ
การตรวจสอบประจำวัน
1. เสียง – มีเสียงผิดปกติหรือไม่
2. กลิ่น – มีกลิ่นเหม็นผิดปกติหรือไม่
3. สภาพภายนอก – ทางระบายอากาศถูกปิดกั้นหรือไม่ ?- มีความผิดปกติอื่น ๆหรือไม่
การตรวจสอบประจำเดือน
1. วัดความต้านทานฉนวน – ต้องมีค่ามากกว่า 1MΩ
2. สี – ซ่อมแซมสีที่หลุดร่อน เพื่อป้องกันสนิม
3. ลูกปืนแบบเปิด (ด้านโหลด สำหรับมอเตอร์ขนาด 250Fr ขึ้นไป) – ตรวจสอบสภาพและปริมาณของจาระบี – เติมหรือเปลี่ยนจาระบีตามปริมาณที่ระบุในแผ่นป้าย
ปัญหาและการแก้ไขเบื้องต้น
1. มอเตอร์ไม่ทำงาน สาเหตุที่เป็นไปได้ / และการแก้ไข
1. ไม่มีกระแสไฟฟ้า / ตรวจสอบระบบไฟฟ้า
2. ฟิวส์ขาด / เปลี่ยนฟิวส์
3. สายไฟขาด แตก / เปลี่ยนสายไฟ
4. จุดเชื่อมต่อแหล่งจ่ายไฟไม่ดี / ทำความสะอาดจุดเชื่อมต่อ,ขันยึดให้แน่น
5. แรงดันไฟฟ้า (Voltage) ต่ำ / ตรวจสอบระบบไฟฟ้าหรือเปลี่ยนขนาด หรือความยาวสายไฟฟ้า
มอเตอร์เสียงดังผิดปกติ สาเหตุที่เป็นไปได้ / และการแก้ไข
1. ต่อไฟขาดไป 1 เฟส (สำหรับมอเตอร์ 3 เฟส) / ตรวจสอบสวิทช์และวงจรควบคุม
2. แหล่งจ่ายไฟผิดปกติ / ตรวจสอบแก้ไขแหล่งจ่าย
3. ใช้งานเกินพิกัด / เลือกใช้มอเตอร์ที่มีกำลังเหมาะสม
4. ลูกปืนเสีย / เปลี่ยนตลับลูกปืนใหม่
5. จารบีในตลับลูกปืนมีน้อยหรือเสื่อม (ตลับลูกปืนแบบเปิด) / เติมหรือเปลี่ยนจารบี
มอเตอร์หมุนช้า สาเหตุที่เป็นไปได้ / และการแก้ไข
1. ระบบช่วยสตาร์ทผิดปกติ / ตรวจสอบและซ่อมแซมระบบช่วยสตาร์ท
2. แหล่งจ่ายไฟผิดปกติ / ตรวจสอบแก้ไขแหล่งจ่ายไฟ
3. ใช้งานเกินพิกัด / เลือกใช้มอเตอร์ที่มีกำลังเหมาะสม
มีการสั่นสะเทือนสูงผิดปกติ สาเหตุที่เป็นไปได้ / และการแก้ไข
1. เครื่องจักรที่นำมาประกอบมีความไม่สมดุลมากเกิน / ตรวจสอบแก้ไขค่าความสมดุลของชิ้นส่วนเครื่องจักรที่นำมาประกอบ
2. การประกอบคัปปลิงไม่ได้ศูนย์ / ปรับตั้งความเยื้องศูนย์ให้ถูกต้อง(พิจารณาการขยายตัวจากความร้อนด้วย)
3. ฐานยึดมอเตอร์ไม่มั่นคงหรือโบลท์ยึดหลวม / เสริมความแข็งแรงให้ฐาน หรือขันโบลท์ให้แน่น
สินค้าที่เกี่ยวข้อง

มอเตอร์ MITSUBISHI รุ่น SP-QR กำลัง 1/3 แรงม้า
Original price was: 4,560.00 บาท.2,200.00 บาทCurrent price is: 2,200.00 บาท.
หยิบใส่ตะกร้า

เครื่องยนต์เบนซิน MARTON 5.5 แรงม้า
5,400.00 บาท
หยิบใส่ตะกร้า

เครื่องยนต์ MARTON 9 แรงม้า (เบนซิน)
10,800.00 บาท
หยิบใส่ตะกร้า

THAISIN TSM มอเตอร์ไฟฟ้า
5,470.00 บาท
หยิบใส่ตะกร้า

เครื่องยนต์ MARTON 13 แรงม้า (เบนซิน)
13,860.00 บาท
หยิบใส่ตะกร้า





